
I robot sono stati a lungo immaginati nei romanzi e nei film di fantascienza, ma la tecnologia attuale dimostra che tali macchine non sono più un punto di fantasia.
Ora i robot sono in grado di svolgere compiti estremamente dettagliati: dai veicoli volanti, al calcolo dei dati, alla risposta alle emergenze e all'assistenza medica.
Ogni giorno vengono fatti grandi progressi per sviluppare ulteriormente robot diversi, intelligenti e multi-capaci, e spesso le donne sono in prima linea in questo tipo di lavoro.
In questo articolo, mettiamo in evidenza cinque donne che stanno "uccidendo" nel campo della robotica.
Sheila Russo
Assistente professore di ingegneria meccanica, Boston University
I robot aiutano gli esseri umani nelle aule, nelle fabbriche e persino nelle sale operatorie e Sheila RussoL'ultimo lavoro con la robotica morbida è un esempio di questo.
Russo ha lavorato con un team dal Wyss Institute di Harvard per l'Ingegneria di ispirazione biologica, Harvard John A. Paulson Scuola di Ingegneria e Scienze Applicate (SEAS) e Boston University per sviluppare un nuovo metodo per fabbricare materiali morbidi millimetro scala, spianando la strada per microrobots flessibili da utilizzare nelle procedure mediche e in altri ambienti difficili da accedere.
Russo ha contribuito all'avvio del progetto come postdottorato presso il Wyss Institute e il SEAS.
I robot morbidi, il cui interno ed esterno sono entrambi realizzati con materiali morbidi, promettono una maggiore flessibilità nel lavorare intorno a ambienti mutevoli o non strutturati, in un modo che non potrebbe essere ottenuto dai tradizionali e rigidi robot.
Per dimostrare la loro nuova tecnologia, Russo e il suo team hanno creato un robot ragno morbido utilizzando un nuovo processo di fabbricazione per progettare robot a scala millimetrica con funzioni multiple.
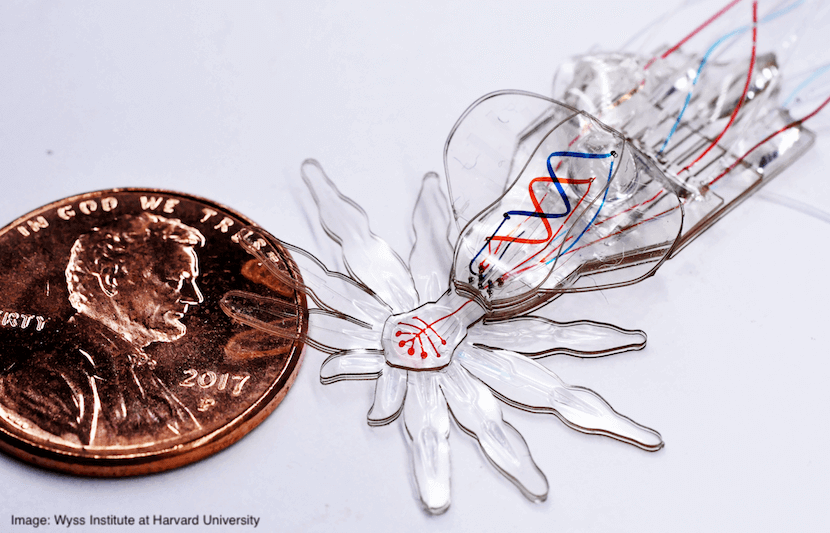
Il processo di fabbricazione, chiamato MORPH (Microfluidic Origami for Reconfigurable Pneumatic / Hydraulic), combina tre tecniche di fabbricazione esistenti: litografia morbida, microlavorazione laser e auto-piegatura indotta dall'iniezione.
I ricercatori ritengono che questo nuovo processo consentirà ai robot soft di esplorare ambienti altamente non strutturati e complessi per molteplici applicazioni, che vanno dalla manipolazione sicura e delicata dei tessuti all'interno del corpo umano alla ricerca e al salvataggio in aree pericolose.
"I più piccoli sistemi robotici morbidi tendono ancora ad essere molto semplici, con in genere solo un grado di libertà, il che significa che possono solo attivare un particolare cambiamento nella forma o nel tipo di movimento", ha detto Russo in una dichiarazione.
"Sviluppando una nuova tecnologia ibrida che fonde tre diverse tecniche di fabbricazione, abbiamo creato un ragno robot morbido fatto solo di gomma siliconica con gradi di libertà 18, comprendente i cambiamenti nella struttura, nel movimento e nel colore e con caratteristiche minime nella gamma del micrometro. ”
[Divisore]
Daniela Rus
Direttore del Laboratorio di Informatica e Artificial Intelligence (CSAIL), MIT
Come professore di ingegneria elettrica e informatica, e direttore di CSAIL al MIT, Daniela Rus ha lavorato su una pletora di progetti nel campo della robotica, del mobile computing e della scienza dei dati.
Tra quei progetti, Rus ha creato un robot capace di alterando il suo aspetto e le sue abilità cambiando gli esoscheletri. Conosciuto come "Primer", questo design di robot è un allontanamento dal pensiero tradizionale in cui i robot sono costruiti per eseguire un compito o soddisfare uno scopo specifico.
Invece, Primer ha la capacità di adottare la forma più adatta per un determinato compito.
Dopo aver visto l'inflessibilità come un ostacolo al campo della robotica, Rus e il suo team volevano sviluppare un robot in grado di eseguire una serie di funzioni senza contrattempi tradizionali.
"I robot - e in particolare i robot dal corpo rigido, come quelli che si vedono nei film - sono generalmente piuttosto rigidi, poiché la maggior parte delle volte ciascuna delle loro parti ha una struttura fissa e un unico scopo definito", ha affermato Shuhei Miyashita, un ex collaboratore di ricerca postdoctor CSAIL che ora è docente di robotica intelligente presso l'Università di York nel Regno Unito.
"Ciò significa che non possono essere facilmente sviluppati per ottenere diversi tipi di compiti."
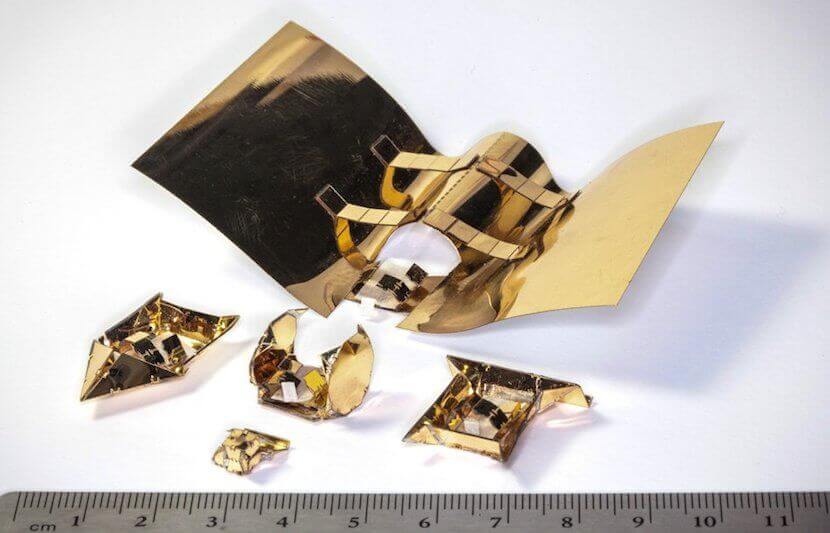
Senza esoscheletri, Primer ha l'aspetto di un cubetto di zucchero d'oro. Indossando i suoi vari esoscheletri, può camminare, rotolare, navigare e planare.
Il suo movimento è controllato da magneti e i suoi esoscheletri si presentano sotto forma di fogli di plastica che, una volta riscaldati, si ripiegano attorno a Primer. Una volta compiuto il compito, Primer elimina l'esoscheletro immergendosi nell'acqua.
"Il nostro approccio dimostra che la produzione ispirata agli origami ci consente di avere componenti robotici versatili, accessibili e riutilizzabili", ha affermato Rus in una dichiarazione.
I ricercatori propongono che questo lavoro possa essere utilizzato per una serie di applicazioni - dalla somministrazione di farmaci all'interno del corpo, ai progetti futuri dei veicoli.
[Divisore]
Mozhdeh Shahbazi
Professore di ingegneria geomatica, Università di Calgary
Volo autonomo in veicoli robotici senza l'uso della tecnologia GPS sta diventando una realtà, grazie al lavoro di Mozhdeh Shahbazi e la sua recente tecnologia dei droni.
Shahbazi ha speso la sua carriera accademica e professionale facendo avanzare la tecnologia 3D per la mappatura e la modellazione su misura. Per lei, i veicoli aerei senza equipaggio (UAV) fungono da "piattaforma per migliorare la mappatura e la navigazione".
Ma fino a poco tempo fa, gli UAV si affidavano alla tecnologia GPS per guidarli attraverso l'aria.
Questo è un problema perché, quando le macchine volanti raggiungono le aree urbane, i grattacieli e le altre infrastrutture urbane interrompono il segnale GPS. Nelle aree rurali, gli alberi fanno lo stesso.
Shahbazi riconobbe questi difetti del passato volo autonomo, ma vide il potenziale nell'idea.
“UAV autonome o altri tipi di sistemi senza pilota (robot) può essere ampiamente applicabile come strumenti geospaziali se insegniamo loro correttamente come interagire con l'ambiente che li circonda per navigare in modo sicuro se stessi e, anche, per l'adempimento delle missioni di mappatura che diamo loro, "Disse a TUN.
"Le applicazioni geomatiche di queste soluzioni, che mi interessano, comprendono l'ispezione dell'infrastruttura, la mappatura di emergenza su richiesta, la modellizzazione della città, la gestione della fauna selvatica e l'agricoltura di precisione".
Per lavorare su un sistema migliore, progetta "l'implementazione di tecniche basate sulla visione per una navigazione precisa", creando una "pianificazione attiva basata su attività per l'acquisizione di immagini autonome" e sviluppando un calcolo semantico della visione stereoscopica per l'automazione e l'accuratezza Mappatura 3D dell'infrastruttura. "
Ciò significa che la sua nuova tecnologia 3D dovrebbe essere in grado di "vedere" le infrastrutture urbane, come edifici, torri di telecomunicazione, linee elettriche e strade, per valutare la sua posizione.
"Utilizzando più telecamere, gli UAV possono visualizzare l'ambiente circostante in gradi 360 ed eseguire la ricostruzione 3D in tempo reale", ha affermato.
"Usa queste informazioni per determinare sia la sua posizione attuale che la sua prossima mossa, che dovrebbe riguardare non solo raggiungere la destinazione desiderata in sicurezza, ma anche compiere il compito che è stato dato".
Sebbene non abbia ancora testato la sua tecnologia sul campo, ha collaborato con Augmented Urban Space Modeling Lab alla York University, sotto la supervisione di Gunho Sohn, professore associato di ingegneria geomatica all'Università di York.
[Divisore]
Allison Okamura
Professore di ingegneria meccanica, Stanford University
Insieme ad altri ricercatori della Stanford University e della UC Santa Barbara, Allison Okamura sviluppato un robot "morbido" che può estendi la punta e cambia direzione senza muovere il corpo.
Perché sarebbe in grado di manovrare bene in spazi ristretti o limitati, un tale robot potrebbe essere utilizzato per eliminare i blocchi nelle arterie o tunnel attraverso i detriti nelle operazioni di ricerca e salvataggio.
L'ispirazione proviene da organismi naturali che coprono la distanza crescendo dalle loro punte, come rampicanti, funghi e cellule nervose.
"Essenzialmente, stiamo cercando di capire i fondamenti di questo nuovo approccio per ottenere mobilità o movimento da un meccanismo", ha detto Okamura in una dichiarazione.
"È molto, molto diverso dal modo in cui gli animali o le persone fanno il giro del mondo."
Il robot è dotato di piccole camere di controllo pneumatico e una fotocamera sulla punta, che è tenuta in posizione da un cavo che attraversa il suo corpo e fornisce un feedback visivo dell'ambiente. Il robot morbido cresce a causa della pressione pneumatica all'interno di esso, come un palloncino gonfiabile, che gli consente di trasportare le cose al suo interno.
Ciò che è diverso nel caso del robot morbido, in contrasto con un palloncino, è che la pressione porta solo alla spiegatura della punta. Poiché il corpo del robot stesso non si espande, ma prende la forma del percorso della punta, non conduce ad un attrito radente tra il corpo e le pareti dell'ambiente.
Questa caratteristica è fondamentale per la capacità del robot di manovrare spazi ristretti.
Il team di ricerca sta valutando la potenziale applicazione del robot morbido negli interventi endovascolari.
A differenza delle tecniche convenzionali, che potrebbero rappresentare un problema quando un catetere inserito in un sistema arterioso deve attraversare i vasi sanguigni più stretti, il robot morbido non deve affrontare la stessa limitazione. La punta del robot sarebbe in grado di navigare le intricate vie del sistema vascolare e portare il catetere lungo anche attraverso i vasi sanguigni stretti senza rompere le pareti dei vasi sanguigni.
Inoltre, il robot morbido sarebbe utile nelle operazioni di ricerca e salvataggio, dove potrebbe essere utilizzato per tessere la sua strada attraverso i detriti, senza destabilizzarlo, e fornire acqua alle persone che sono intrappolate sotto.
Il robot morbido sarebbe anche utile nella costruzione, dove potrebbe essere utilizzato per guidare cavi, fili e tubi flessibili attraverso spazi stretti o difficili da raggiungere.
[Divisore]
Kathleen O'Donnell
Staff Industrial Designer, Wyss Institute presso l'Università di Harvard
Come membro dello staff del Wyss Institute, Kathleen O'Donnell ha condotto uno sforzo per tradurre una tecnologia robotica "esosuit" nella clinica consente alle vittime di ictus di camminare normalmente.
La tecnologia, che è stata sviluppata da un gruppo di ricerca presso la John A. Paulson School of Engineering and Applied Sciences (SEAS) dell'Università di Harvard, in collaborazione con il Wyss Institute for Biologically Inspired Engineering di Harvard e il College of Health & Rehabilitation Sciences della Boston University: Sargent College, è una tuta robotica che si attacca a un arto "emiparesi", o un arto che soffre di perdita di mobilità.
L'exosuit è attaccato all'arto colpito con emiparesi sotto forma di un indumento aderente alla pelle, e usa la forza meccanica per fornire la forza extra necessaria per il movimento dell'arto normalmente.
L'esosuit è alimentato da una batteria indossata su una cintura, e la potenza viene trasmessa all'arto interessato attraverso una serie di cavi, simile al modo in cui i muscoli del palmo e dell'avambraccio muovono le dita con i tendini.

O'Donnell si interessò al prototipo e lavorò con ReWalk Robotics, una società che produce e distribuisce dispositivi meccanici progettati per aiutare coloro che soffrono di diminuita capacità di deambulazione, è entrata in una partnership con l'obiettivo di produrre in serie e ampiamente commercializzando esosuits basati sul prototipo.
La stessa O'Donnell aveva precedentemente lavorato come ingegnere di supporto sul campo per Integra Neurosciences, e ha osservato in prima persona alcune delle sfide del mondo reale incontrate in sala operatoria e in terapia intensiva.
"Ciò che rende lo sviluppo soft exosuit così unico è l'estrema natura multidisciplinare del lavoro. Oltre alla nostra variegata esperienza tecnica come team, la nostra ricerca con partecipanti di studio volontari è stata fondamentale per capire come abbiamo bisogno di progettare e costruire questi exosuits ", ha detto in una dichiarazione.
Conclusione
La tecnologia di oggi è in grado di compiere imprese incredibili e i robot stanno progredendo per svolgere compiti in quasi tutti i campi della scienza.
Ognuna di queste donne ha contribuito in modo significativo a concettualizzare, progettare e promuovere la creazione di nuove macchine impressionanti.

