Un team di tre robotisti della Queensland University of Technology (QUT) ha sviluppato un modo più veloce e preciso per robot per afferrare oggetti in tempo reale, aprendo porte per applicazioni sia in contesti industriali che domestici.
Vostro carta è stato presentato alla conferenza internazionale di robotica della Carnegie Mellon University, Robotica: scienza e sistemi, la settimana scorsa.
Fare piccoli passi
Nessuno può negare che la robotica sia la via del futuro. Secondo il International Data Corporation, la spesa mondiale per la robotica raggiungerà i 135 miliardi di dollari entro il 2019.
Mentre i robot hanno da tempo sostituito il lavoro umano nelle linee di assemblaggio e nel calcolo e hanno persino iniziato a vedere, ascoltare e pensare come gli umani negli scacchi e nei dibattiti, i robot non riescono a cogliere una cosa: raccogliere un oggetto in un ambiente non strutturato.
Anche per gli umani, anche se inosservati, migliaia di sensori nelle dita umane e la complessa rete di circuiti all'interno del cervello umano consentono a un bambino di tre mesi di raccogliere il suo sonaglio giocattolo. Tuttavia, ovviamente non ha bisogno di ore di formazione o di centinaia di ricercatori per insegnargli.
Ma per i robot, afferrare oggetti in ambienti non strutturati è estremamente difficile. Tuttavia, per essere utili intorno agli esseri umani, i robot devono sapere come adattarsi ai mutevoli ambienti.
Il team QUT ha sviluppato un nuovo metodo per consentire ai robot di afferrare oggetti che si muovono in modo casuale in modo più rapido e preciso.
"Ci interessa creare robot che svolgano compiti utili nel mondo reale. Sono stato interessato per un po 'di tempo a convincere i robot a interagire in modo robusto con il mondo, raccogliere oggetti e posizionarli correttamente ", ha detto Jurgen Leitner, un ricercatore post-dottorato presso QUT's Facoltà di Scienze e Ingegneria. "Si scopre che alcune cose che sono difficili per noi sono semplici per i computer, come gli scacchi, mentre alcune cose che sono facili per noi sono molto difficili per i robot, come afferrare."
Il nuovo approccio
Le tecniche di deep learning consentono ai robot di imparare da migliaia di dimensioni e forme per calcolare il modo migliore per afferrare un oggetto sconosciuto in una condizione statica.
Ad esempio, un robot con rete neurale convoluzionale (CNN), il metodo più utilizzato per il riconoscimento degli oggetti, campiona e classifica gli oggetti individualmente e pensa alla migliore presa possibile. Tuttavia, questa tecnica richiede molto tempo di calcolo, anche in ambienti statici.
Il metodo dei ricercatori, tuttavia, si basa su una rete neurale convoluzionale di presa generativa (GG-CNN), che scansiona direttamente il suo ambiente e mappa ogni pixel che cattura utilizzando un'immagine di profondità ed è abbastanza veloce da afferrare oggetti in movimento.
"L'approccio Generative Grasping Convolutional Neural Network funziona prevedendo la qualità e la posa di una presa con due dita su ogni pixel. Mappando ciò che si trova di fronte utilizzando un'immagine di profondità in un unico passaggio, il robot non ha bisogno di campionare molte diverse possibili prese prima di prendere una decisione, evitando lunghi tempi di elaborazione ", ha detto Douglas Morrison, un ricercatore di dottorato QUT in un dichiarazione.
Mentre il loro robot precedente, che ha vinto l'Amazon Picking Challenge nel 2017, ha semplicemente guardato in un contenitore di oggetti, ha calcolato la migliore presa possibile ed è entrato alla cieca per raccoglierli, la loro versione aggiornata elabora le immagini degli oggetti entro circa 20 millisecondi.
Secondo Leitner, dopo aver raccolto gli oggetti, il loro robot attuale li posiziona in una posizione fissa e inizia a cercare l'elemento successivo sulla scena.
Il mondo imprevedibile
I ricercatori hanno testato il loro nuovo approccio in diversi modi.
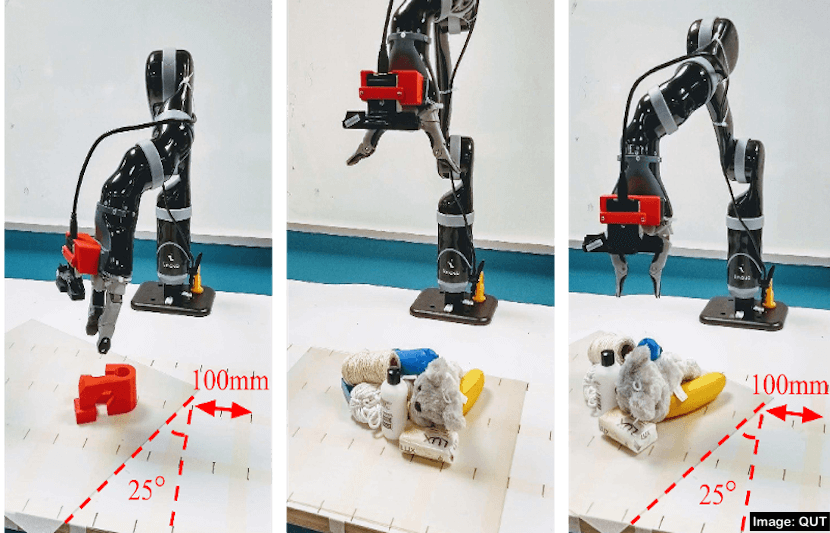
"C'erano varie configurazioni sperimentali, tutte con robot e oggetti del mondo reale", ha detto Leitner. "Abbiamo testato con una gamma di" oggetti domestici ", oggetti stampati in 3D e abbiamo verificato l'approccio con diversi livelli di rumore nel controller del robot."
In primo luogo, hanno eseguito 10 prove sull'afferrare oggetti invisibili con geometria antagonista e oggetti domestici sia in ambienti statici che in movimento.
Mentre il robot ha raggiunto una percentuale di successo dell'84% per la geometria antagonista e del 92% per oggetti domestici in ambienti statici, ha raggiunto rispettivamente l'83% e l'88% in ambienti in movimento.
In secondo luogo, hanno mescolato 10 oggetti di prova in una scatola e l'hanno versata in una pila disordinata sotto il robot in modo che potesse afferrarli uno per uno. Hanno quindi eseguito 10 prove sulla presa sia in ambiente statico che in movimento.
Mentre il robot ha raggiunto una percentuale di successo dell'87% in ambienti statici, ha raggiunto l'81% in ambienti in movimento.
"Utilizzando questo nuovo metodo, possiamo elaborare le immagini degli oggetti che un robot visualizza entro circa 20 millisecondi, il che consente al robot di aggiornare la sua decisione su dove afferrare un oggetto e quindi farlo con uno scopo molto più grande. Ciò è particolarmente importante negli spazi ingombri ", ha detto Letiner in una dichiarazione.
Il prossimo passo
I ricercatori sperano di migliorare ulteriormente il loro metodo per utilizzare i robot in modo più sicuro e diffuso intorno agli esseri umani in ambienti industriali e domestici.
"Questa linea di ricerca ci consente di utilizzare sistemi robotici non solo in ambienti strutturati in cui l'intera fabbrica è costruita sulla base di capacità robotiche", ha affermato Leitner in una nota. “Questo ha vantaggi per l'industria, dai magazzini per lo shopping e lo smistamento online fino alla raccolta della frutta. Potrebbe anche essere applicato in casa, poiché vengono sviluppati robot più intelligenti non solo per aspirare o pulire un pavimento, ma anche per raccogliere oggetti e riporli. "
Stanno anche lavorando per superare alcuni dei limiti dell'approccio attuale, come la visione robotica e le capacità di manipolazione in una varietà di impostazioni, secondo Leitner.
Attualmente stanno pianificando di organizzare una "Sfida robotica per riordinare la mia stanza".

