Il ghepardo robot è una delle invenzioni più popolari sviluppate dal MIT nel 21st secolo. Il design, la velocità, le dimensioni, la forza e la capacità di saltare lo hanno reso un fan preferito e gli hanno dato applicazioni reali.
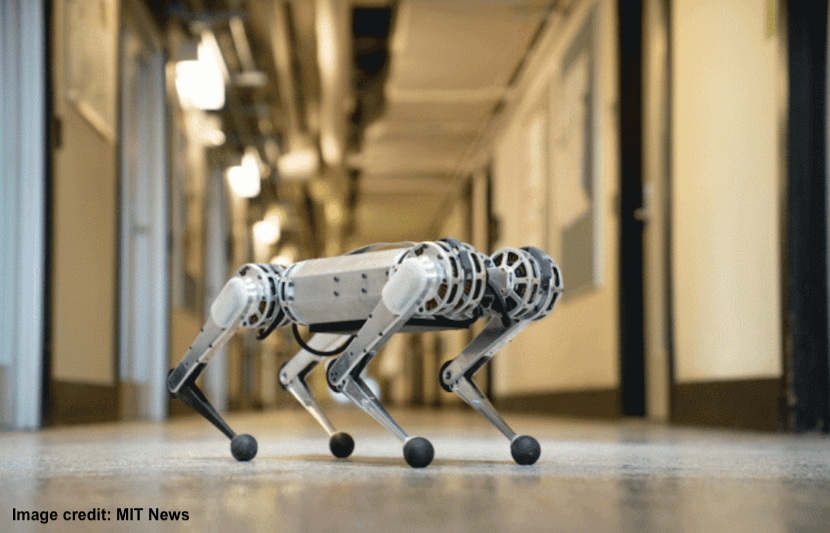
Ora, un robot di terza generazione, chiamato il Cheetah 3, può viaggiare rapidamente su terreni accidentati, salire le scale coperte di detriti e recuperare facilmente il suo equilibrio quando viene spinto o tirato, senza alcuna fonte di visione.
Il robot "cieco" 90-pound potrebbe alla fine condurre ispezioni alle centrali elettriche, farsi strada attraverso i sistemi fognari, salvare le persone nella costruzione di incendi e migliorare la mobilità per la popolazione anziana.
Invece di affidarsi alle telecamere, il gatto meccanico usa la "locomozione cieca" per farsi strada attraverso l'ambiente circostante.
"La tecnologia di locomozione cieca rende il robot molto più robusto contro situazioni inaspettate come calpestare ostacoli o collisioni con oggetti non modellati", ha dichiarato Sangbae Kim, professore associato di ingegneria meccanica al MIT e progettista del robot.
"La visione può essere rumorosa, leggermente imprecisa, a volte non disponibile, e se ti affidi troppo alla visione, il tuo robot deve essere molto preciso in posizione e alla fine sarà lento", ha detto in una nota. "Quindi vogliamo che il robot faccia più affidamento sulle informazioni tattili. In questo modo, può gestire ostacoli imprevisti mentre si muove velocemente. "
Rispetto al Cheetah 2, questo nuovo robot ha migliorato il software e una vasta gamma di movimento.
Può allungarsi avanti e indietro e ruotare da un lato all'altro, rendendolo agile e atletico come un grosso gatto.
Algoritmi avanzati
Fino a questo punto, i ricercatori del Laboratorio di robotica biomimetica del MIT non aveva sviluppato una macchina con un'efficace mobilità su terreni accidentati.
Due nuovi algoritmi - un algoritmo di rilevamento del contatto e un algoritmo di controllo predittivo del modello - danno al Cheetah 3 il potere di recuperare rapidamente il suo equilibrio, camminare su terreni difficili, salire le scale e muoversi con la quasi efficienza di un animale.

L'algoritmo di rilevamento dei contatti consente al robot di capire quando deve interrompere una determinata gamba per oscillare e posizionarla a terra.
Questo algoritmo impedisce al robot di perdere l'equilibrio perché sa se portare a termine un passo o tirare indietro la gamba quando incontra un ostacolo.
Affinché il robot sappia quando eseguire la transizione delle gambe, considera costantemente tre probabilità: quella di una gamba che tocca il suolo, la forza generata dalla gamba che colpisce il suolo e se la gamba sarà a metà oscillazione.
L'algoritmo calcola le probabilità sulla base di dati provenienti da accelerometri, giroscopi e l'angolo e l'altezza di ciascuna gamba rispetto al terreno.
Il corpo del robot può reagire a ostacoli imprevisti. Se calpesta qualcosa, il suo corpo e le sue gambe si adattano in modo da mantenere l'equilibrio.
"Se gli umani chiudono gli occhi e fanno un passo, abbiamo un modello mentale per dove potrebbe essere il terreno, e possiamo prepararci per questo. Ma ci affidiamo anche alla sensazione di toccare il terreno ", ha detto Kim in una dichiarazione. "Stiamo facendo la stessa cosa combinando più [fonti di] informazioni per determinare il tempo di transizione."
L'algoritmo di controllo predittivo del modello determina la forza che il robot deve applicare a ciascuna gamba con ogni fase in modo che possa muovere il suo corpo nel modo più efficace.
Più specificamente, l'algoritmo funziona osservando un mezzo secondo nel futuro per calcolare la posizione corretta del corpo e delle gambe del robot.
"Di 'a qualcuno che prende a calci il robot lateralmente", ha detto Kim in una dichiarazione. "Quando il piede è già a terra, l'algoritmo decide, 'Come dovrei specificare le forze sul piede? Perché ho una velocità indesiderabile a sinistra, quindi voglio applicare una forza nella direzione opposta per uccidere quella velocità. Se applico 100 newton in questa direzione opposta, cosa succederà dopo mezzo secondo? " ”
L'algoritmo rende questi calcoli 20 volte al secondo.
Per testarlo, i ricercatori hanno spinto, tirato e strappato il robot mentre camminava su un tapis roulant.
I ricercatori presenteranno Cheetah 3 ad ottobre al Conferenza internazionale sui robot intelligenti, a Madrid.
Applicazioni del mondo reale
A differenza dei precedenti robot Cheetah, il Cheetah 3 è progettato per proteggere le persone.
"Questa tecnologia ci consentirà di sviluppare una macchina che possiamo inviare in situazioni pericolose invece di inviare un essere umano", ha affermato Kim.
La macchina dovrebbe essere pronta per ispezionare centrali elettriche e impianti chimici in due o tre anni.
Tra tre e cinque anni, sarà in grado di navigare attraverso le fogne, ha detto Kim.
Negli anni 15, potrebbe potenzialmente salvare qualcuno da un edificio in fiamme.
Il Cheetah 3 è già in grado di misurare temperature e composti chimici, aprire porte pesanti e chiudere e aprire valvole.
"Utilizzando la flessibilità degli arti, il Cheetah 3 può aprire la porta con una gamba sola", ha detto Kim in un dichiarazione. "Può stare su tre gambe e equipaggiare il quarto arto con una mano intercambiabile personalizzata per aprire la porta o chiudere una valvola."
Negli anni 20, Kim crede che simili robot dinamici con le gambe potrebbero essere pronti ad aiutare gli anziani nelle loro case.
"Non disponiamo ancora di una tecnologia che possa aiutare le persone con disabilità o anziani a spostarsi senza problemi dal letto alla sedia a rotelle alla macchina e viceversa", ha affermato in una nota.
"Molti anziani hanno problemi ad alzarsi dal letto e salire le scale. Alcuni anziani con problemi alle articolazioni del ginocchio, ad esempio, sono ancora piuttosto mobili su terreno pianeggiante, ma non possono scendere le scale senza assistenza. Questa è una piccolissima parte della giornata in cui hanno bisogno di aiuto. Quindi stiamo cercando qualcosa che sia leggero e facile da usare per un aiuto a breve termine. "
Qual è il prossimo passo?
I ricercatori non intendono che il robot sia "cieco" per sempre. In effetti, hanno già aggiunto alcune telecamere per dargli una visione dei dintorni, quindi è più consapevole dei grandi ostacoli.
Ma per ora, la squadra è focalizzata sul miglioramento del movimento cieco del ghepardo.
"Vogliamo un ottimo controller senza visione prima", ha detto Kim in una dichiarazione. "E quando aggiungiamo una visione, anche se potrebbe darti le informazioni sbagliate, la gamba dovrebbe essere in grado di gestire (ostacoli). Perché cosa succederebbe se passi su qualcosa che una telecamera non può vedere? Cosa farà? Ecco dove la locomozione cieca può aiutare. Non vogliamo fidarci troppo della nostra visione ".

